Introducing the Polar AUV Task Team

Autonomous Underwater Vehicles (AUVs) are free-swimming robots that are designed to explore the global ocean from top to bottom, pole to pole. Taking the human out of the loop, AUVs are best suited to filling data gaps in extreme environments such as abyssal plains, hydrothermal vents and under ice. The first polar AUV missions were legendary – in 1996 Theseus, a 10.7 m long AUV built by International Submarine Engineering – travelled 180 km beneath Arctic sea ice deploying fibre-optic cable as it went and then returned to shore (Ferguson, 1998). Such a bold mission, driven by industry, laid the foundation for the research community to envisage the science these machines could facilitate.
For over two decades, polar AUV research was led by the United Kingdom’s Autosub program based out of the National Oceanographic Centre in Southampton. In 2004 Autosub-II undertook its first long-range missions beneath Arctic fast-ice, and in 2005 went 30 km beneath the Fimbul Ice Shelf in Antarctica (Dowdeswell et al., 2008). Incredible achievements for both marine engineering and polar science. Unfortunately, great marine autonomy rewards come with inherent risk and Autosub-II was lost on its very next mission beneath the ice shelf. To their credit, this inherent risk was understood by the UK community and at the time of the loss, its replacement Autosub-III was already funded and under construction.


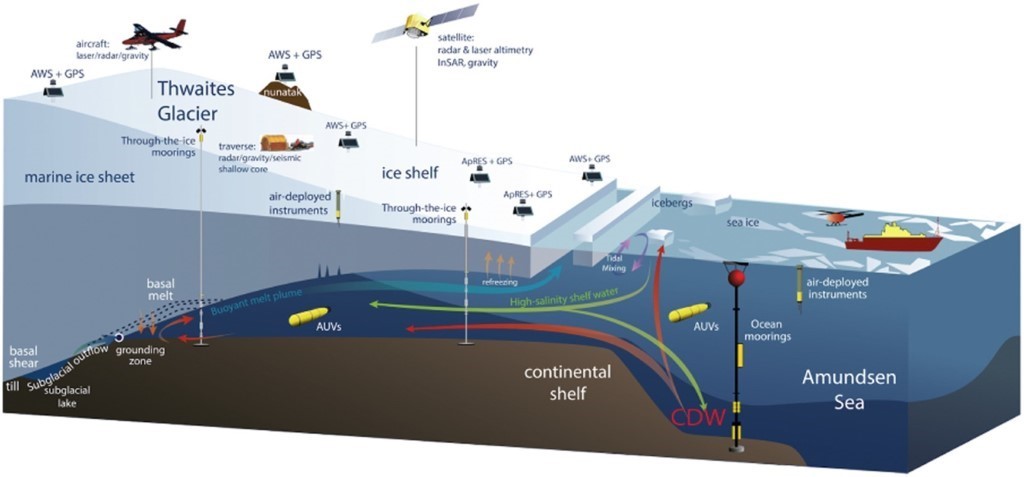
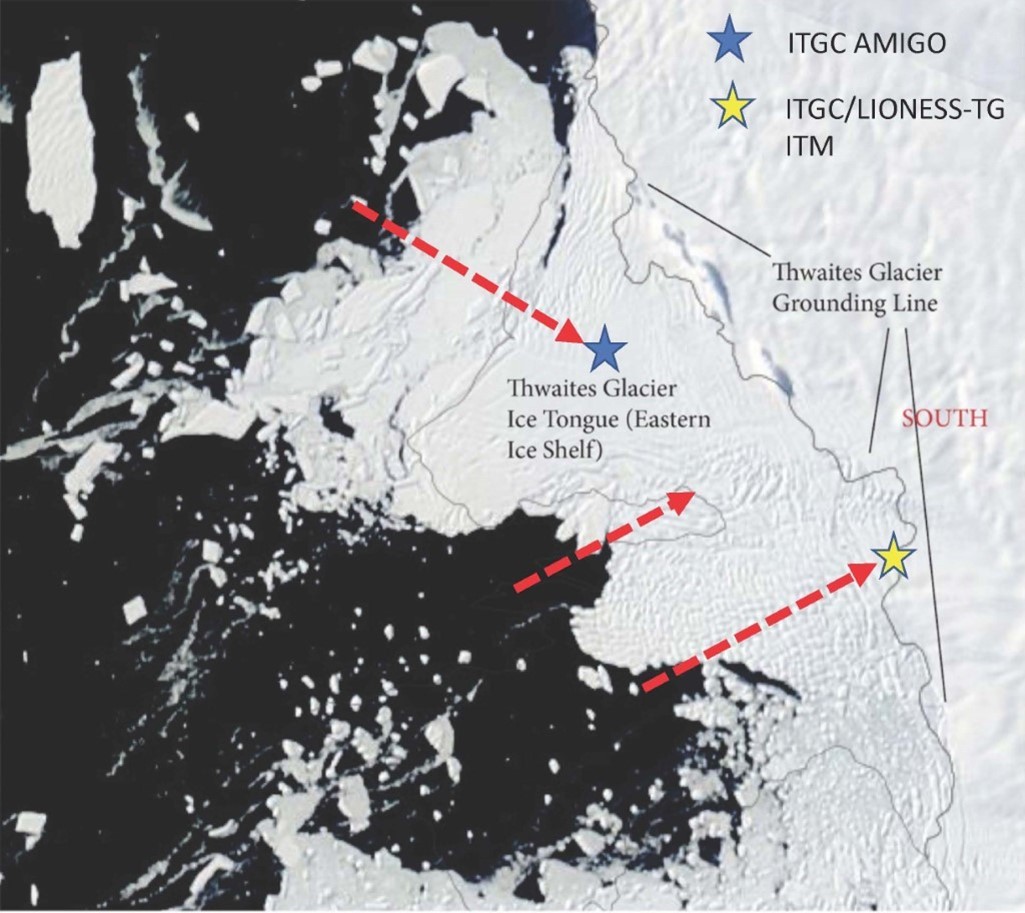
With growing membership and interest, it was decided to split the group into sub-groups of AUV engineers and AUV Principal Investigators with strong linkages. In May 2019, a proposal to form a SOOS Task Team was approved by the SOOS Executive Committee, with an initial goal of sharing data and logistic opportunities. Plans for 2020 were interrupted by COVID and a decision was made to re-focus the Task Team on the emerging likelihood that all three large AUV programs would be heading to the Thwaites Glacier in the 21/22 season. Accordingly, the leadership of the Task Team was established with the key Chief AUV Investigators from the UK (University of East Anglia), Sweden (University of Gothenburg) and the Republic of Korea (Korean Polar Research Institute)/ Australia (University of Tasmania). It was also recommended that given the focus on Thwaites, the Task Team be embedded in the SOOS Amundsen and Bellingshausen Sector (ABS) Regional Working Group. With logistics already outlined for each of the groups, the new objective was for the core Chief Investigators to work together in the development of coordinated science objectives across the three teams. The Task Team met in late 2020 and was formalised in early 2021, including other core Antarctic AUV and associated autonomous observation platform representation. For the first time the community was able to see the broad ambitions for each group to deploy east and west of the Thwaites Glacier, exploring deep beneath the ice to examine hypothesised pathways of warm ocean water and to link up with other ‘through-ice’ observation teams (Figure 5).
Three large AUVs from the UK, Sweden and Australia/Korea, all vying to get to the back of a critically unstable, globally significant ice shelf is reminiscent of the race to the South Pole, or the Moon in terms of challenge, excitement and risk. The important difference this time is that while each AUV team will be doing its best to explore as far and wide beneath the Thwaites Glacier, they’ll be doing it in close cooperation with each other. Antarctica will undoubtedly throw everything it has got against these expeditions but working together through this SOOS initiative ensures the greatest chance of overall success for the Antarctic research community and by extension humankind.
  |
 |
 |
 |
References
Dowdeswell, J., et al., (2008), ‘Autonomous underwater vehicles (AUVs) and investigations of the ice–ocean interface in Antarctic and Arctic waters’, Journal of Glaciology, 54(187), 661-672. doi:10.3189/002214308786570773
Ferguson, J. S. (1998), ‘The Theseus autonomous underwater vehicle. Two successful missions’, Proceedings of 1998 International Symposium on Underwater Technology, Tokyo, Japan, 1998, pp. 109-114, doi: 10.1109/UT.1998.670072.
King, P., et al., (2018), ‘Deploying an AUV beneath the Srsdal Ice Shelf: Recommendations from an expert-panel workshop’, Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV). doi:10.1109/AUV.2018.8729786
Scambos, T.A., et al., (2017), ‘How much, how fast?: A science review and outlook for research on the instability of Antarctica's Thwaites Glacier in the 21st century’, Global and Planetary Change, Volume 153, Pages 16-34, ISSN 0921-8181, https://doi.org/10.1016/j.gloplacha.2017.04.008.
Spears, A., et al., (2015) ‘Design and Antarctic testing of the Icefin vehicle’, OCEANS 2015 - MTS/IEEE Washington, Washington, DC, USA, pp. 1-6, doi:10.23919/OCEANS.2015.7401886.