ROBOTICA Updated (Research of Ocean-ice BOundary InTeraction and Change around Antarctica)

Shigeru Aoki1, Takeshi Tamura2 and Team ROBOTICA
1Institute of Low Temperature Science, Hokkaido University, Japan
2National Institute of Polar Research, Japan
In 2016, SOOS endorsed the national Japanese research project ROBOTICA, which focuses on the continental margin off East Antarctica, looking at the potential impact of unstable under-ice topography on global sea level rise and the effect of polynyas on bottom water formation. The six-year (2016-2022) project, ROBOTICA, focuses on the three distinctive areas in East Antarctica; in the Lützow-Holm Bay adjacent to Cosmonaut Sea, in front of Totten Glacier off Sabrina Coast, and off Cape Darnley of Mac. Robertson Land. The project aims to collect observations to further enhance our understanding of the interactions between ocean and land ice/sea ice. Through a multi-disciplinary approach development of new observation techniques, the project is enhancing the understanding of ocean-ice behaviours.
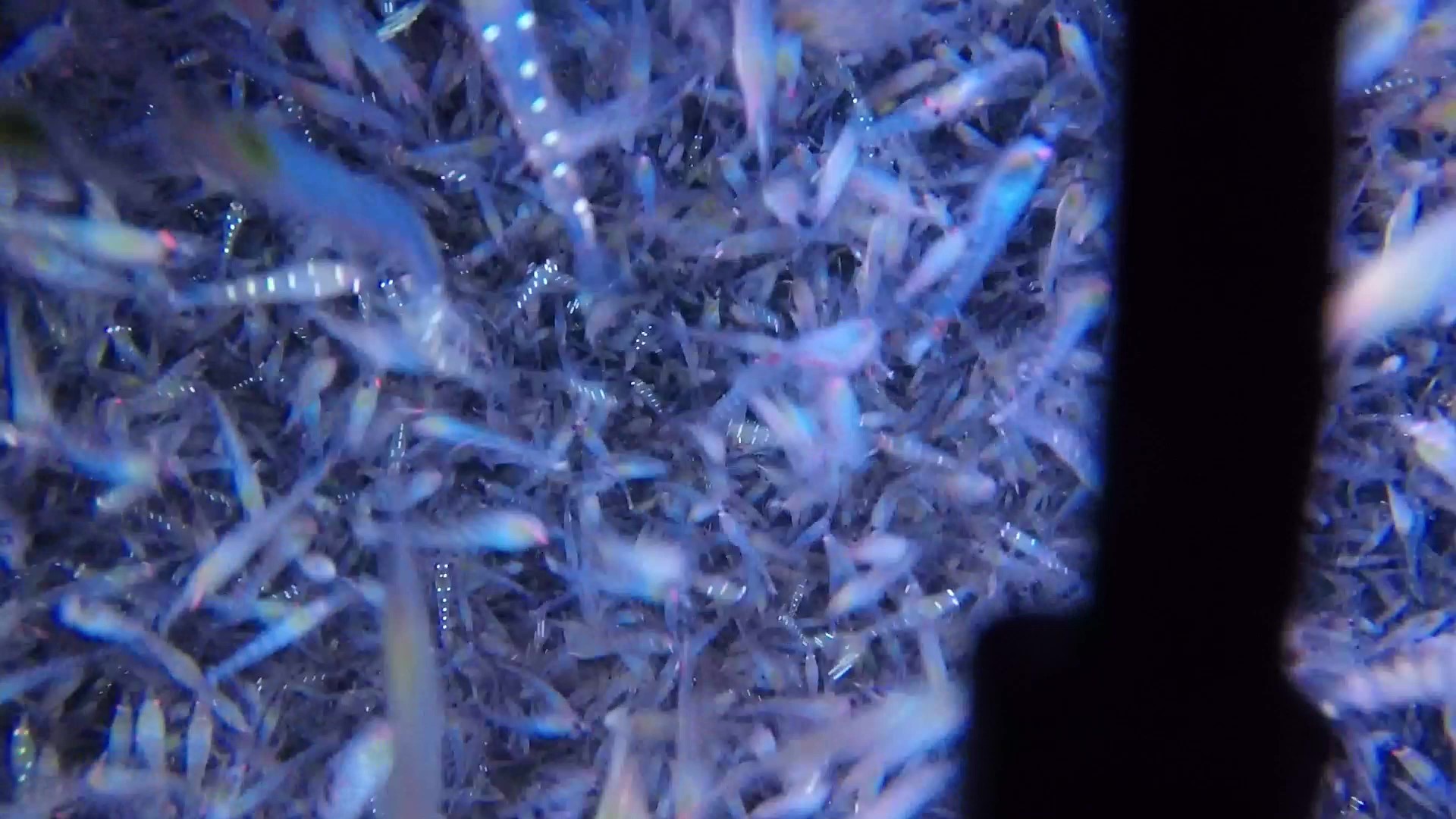
By operating a Remotely Operated Vehicle (ROV), an unmanned marine observation platform designed in this project, we found a large aggregation krill in Lützow-Holm Bay (Figure 3). The platform laid the foundation for the application of multidisciplinary observations in the future. Joint observations with seal biologging are producing valuable information on oceanic physical structure. While promoting the data disclosure through ADS, we would like to contribute to the creation of a new picture of ocean-ice system of East Antarctica.